|
引文格式:
He R, Tian Z, Zuo M. Machine prognostics under varying operating conditions based on state-space and neural network modeling[J]. Mechanical Systems and Signal Processing, 2023, 182: 109598.
He, Rui, Zhigang Tian, and Mingjian Zuo. "Machine prognostics under varying operating conditions based on state-space and neural network modeling." Mechanical Systems and Signal Processing 182 (2023): 109598.
He, R., Tian, Z., & Zuo, M. (2023). Machine prognostics under varying operating conditions based on state-space and neural network modeling. Mechanical Systems and Signal Processing, 182, 109598.
背景简介
在实际应用中,机器在使用寿命期间通常在不同的操作条件下运行,例如风力涡轮机的轴承和齿轮箱长期受到不断变化的转速和载荷的影响。尽管预测技术在近年来取得了不错的进展,但是不同的工作条件可能对已开发的预测模型的发展产生显著的影响。
基于状态的维护(CBM)是基于可用状态监测数据的维护决策,能够用于预测机器的剩余使用寿命(RUL),降低维护成本并提高系统安全性。然而基于状态空间的预测方法通常假设退化机制在不同的操作条件下保持不变,同时状态空间模型的构建需要完整的训练数据,才可以涵盖所有可能的操作条件,这些限制导致现有的状态空间模型并不适用于新条件下运行的设备的RUL预测。深度学习方法具有从状态监测数据中提取退化特征的卓越能力,在RUL预测中越来越受欢迎。但是,基于深度学习模型的预测通常假设训练和测试数据来自具有相似工作条件的相同设备,然而实践中测试设备的新工作条件可能不会记录在训练数据集中,因此限制了基于学习的剩余使用寿命(RUL)预测模型的发展。因此本研究提出了一种基于状态空间建模和强化学习的新型预测模型,用于预测在外推新条件下运行的设备的RUL,而无需相应的训练数据。
成果介绍
(1)提出了一种基于状态空间建模和强化学习的新型预测模型,该模型在状态空间模型的基础上,提出一种结合Lyapunov约束和强化学习的可解释预测模型来预测设备RUL;其次,集成一种基于H∞鲁棒性思想的对抗训练方法,以减少状态空间建模误差的影响,提出的模型旨在减少RUL与运行参数之间的因果关系,并增加 RUL与未观察到的退化特性之间的因果关系(图1)。
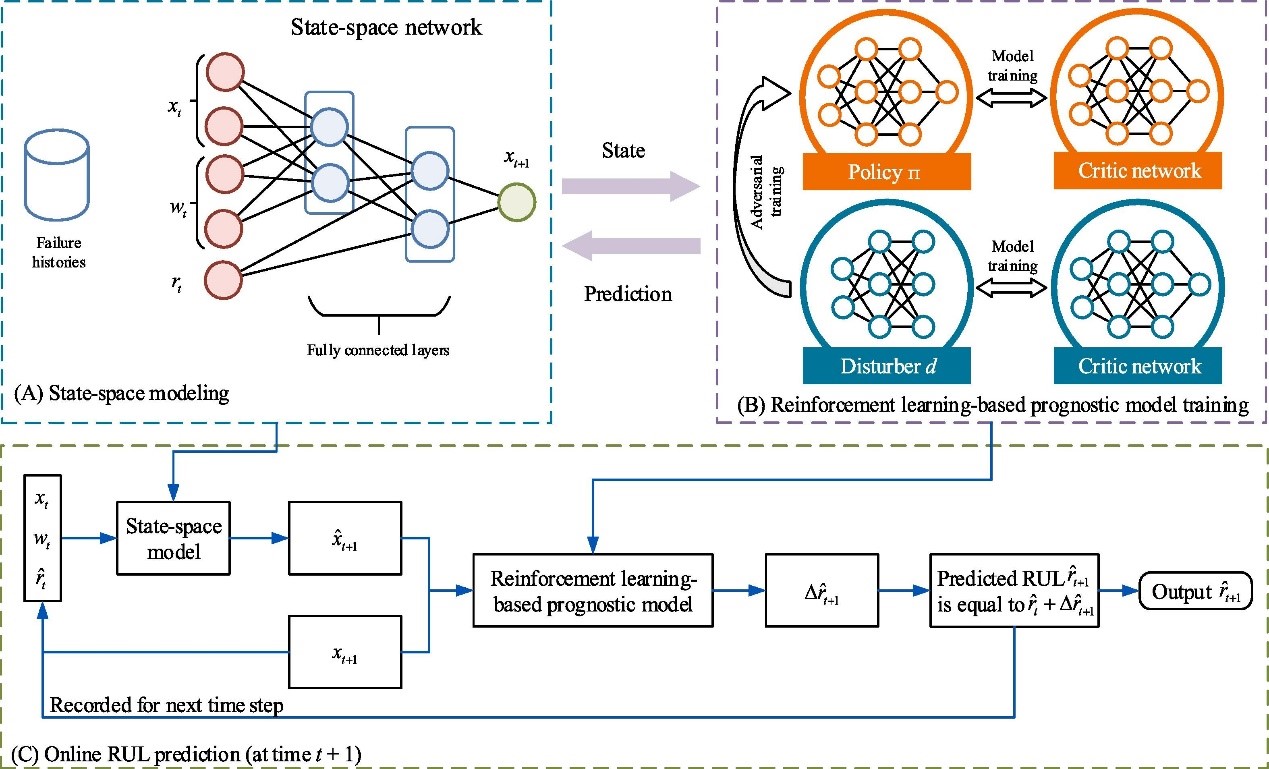
图1 基于状态空间建模和强化学习的无模型预测方法框架
(2)比较了长短记忆神经网络模型(LSTM)、使用卡尔曼滤波(UKF)的状态空间建模(SUKF)、使用强化学习模型(SRL)的状态空间建模、提出的基于鲁棒强化学习方法的状态空间建模(SRRL)四种模型的预测性能。
结果表明所有方法在源域数据上的预测性能都明显优于目标域数据,对于接近故障的变速箱,所有预测都非常准确。与基于状态空间的方法相比,在任何时间周期使用 LSTM 进行的RUL预测具有很大的可变性。与其他方法相比,SUKF模型表现出较小的变异性,但是存在高偏差的问题,表明当状态空间由神经网络建模时,UKF算法并不能较好地执行寿命预测。当训练和测试齿轮箱以相似的转速运行时,SRL 预测效果较好,但是,SRL模型高估的RUL将导致目标域数据的泛化错误。而对抗训练减轻了模型对状态空间误差引起的干扰的敏感性,因此提出的 SRRL可以预测在新条件下运行的齿轮箱的RUL(图2)。
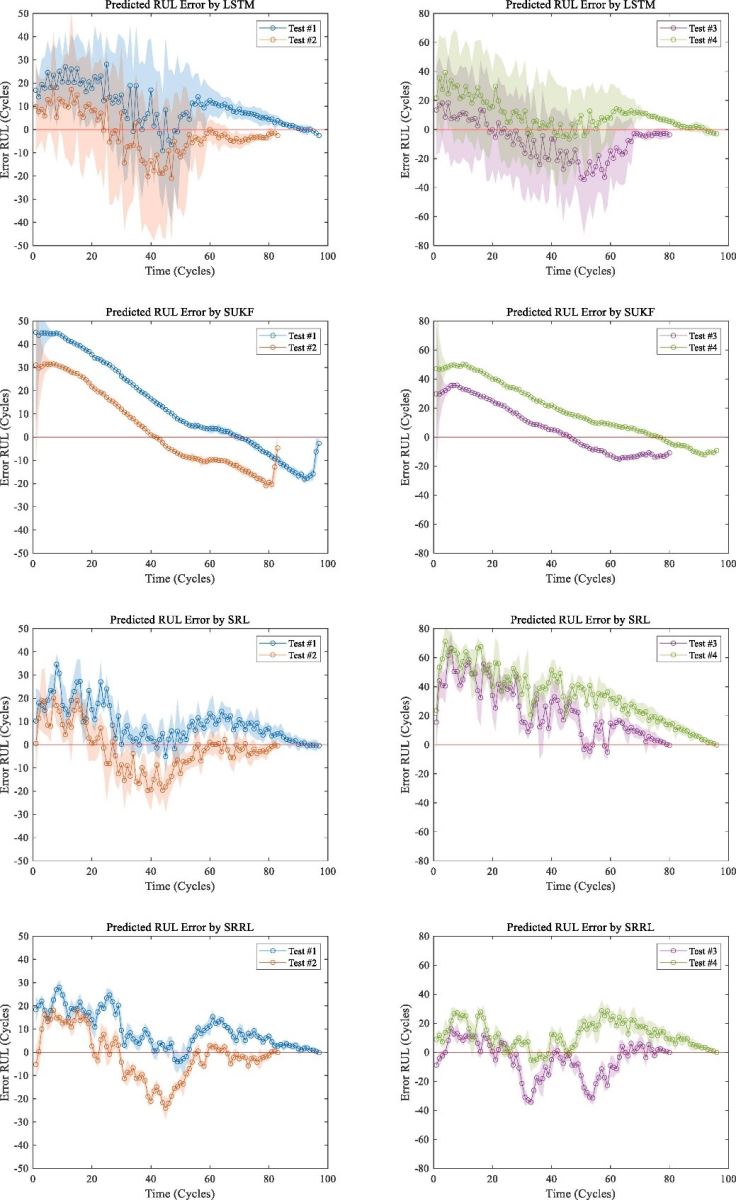
图2 通过不同方法对每个测试历史记录的 RUL 预测误差
(3)采用新南威尔士大学(UNSW)提供的轴承数据集进行RUL预测。由于轴承特征在不同的转速下存在显著差异,因此数据驱动的状态空间模型在预测新速度下运行的轴承寿命时具有较大的估计误差。SUKF直接最小化状态空间模型和观测信号之间的残差,这可能导致预测的RUL在错误方向上收敛。LSTM 和 SRL具有相似的RUL预测,但偏差非常高,表明当模型仅简单地过度拟合训练数据时,预测模型无法推广到具有新工作条件的设备。相反,所提出的SRRL方法将状态空间误差视为干扰项,并利用对抗训练来降低该误差对RUL预测的影响,因此SRRL估计的RUL平滑单调,变异性较小。SRRL表现出明显的收敛趋势,反映了对抗训练在RUL预测中的重要性(图3)。
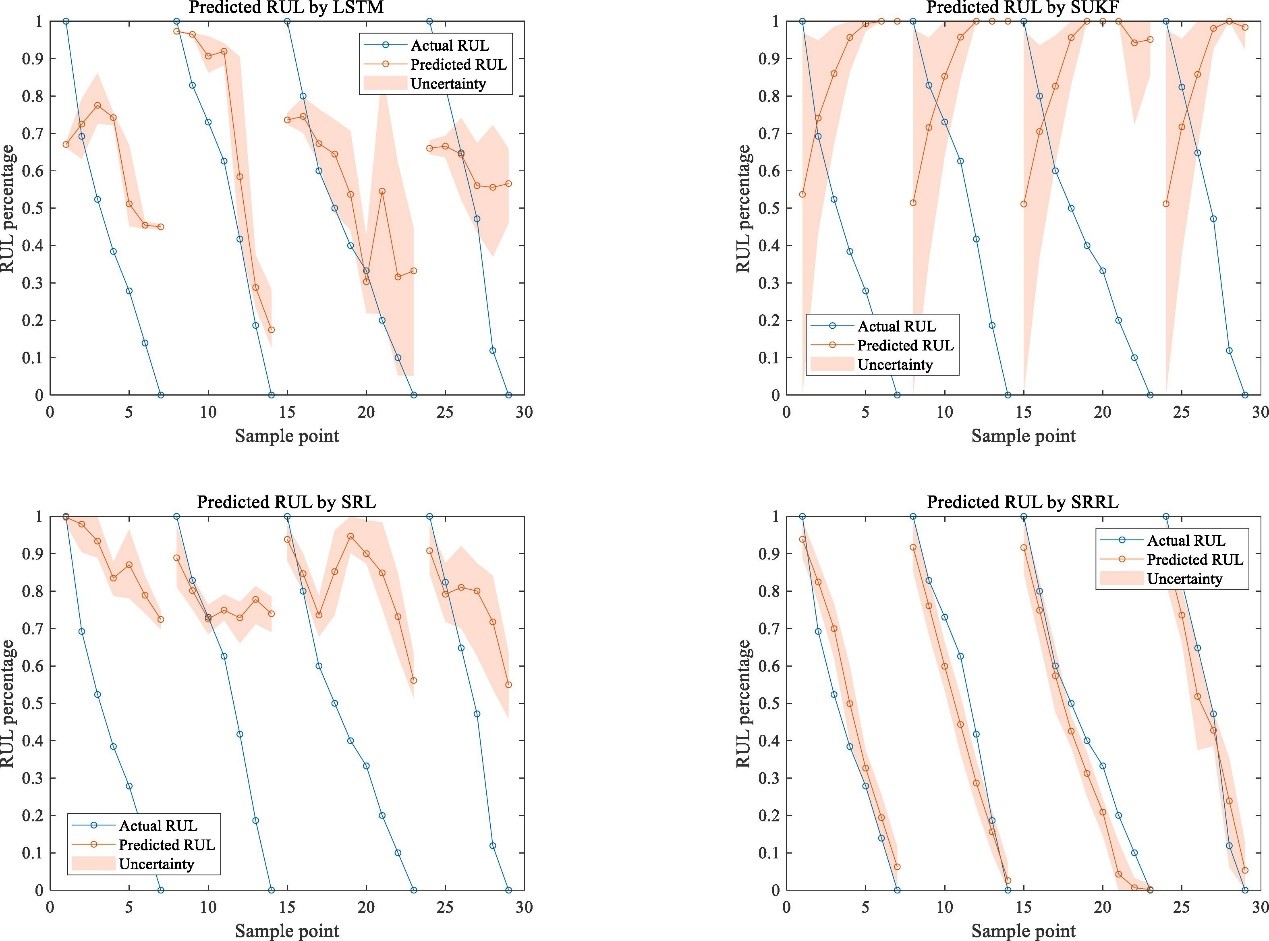
图3 使用不同方法对四个测试轴承的RUL预测结果
图4显示了均方根误差(RMSE)和平均绝对百分比误差(MAPE)的测试结果,其中每种方法使用不同的随机种子和学习率重复10次。结果表明所提出的SRRL方法优于其他三种方法,与其他方法相比,使用SRRL方法后,RMSE的降低范围为55%至75%,MAPE的降低范围为60%至75%,并且仅SRRL成功预测目标域轴承的RUL。
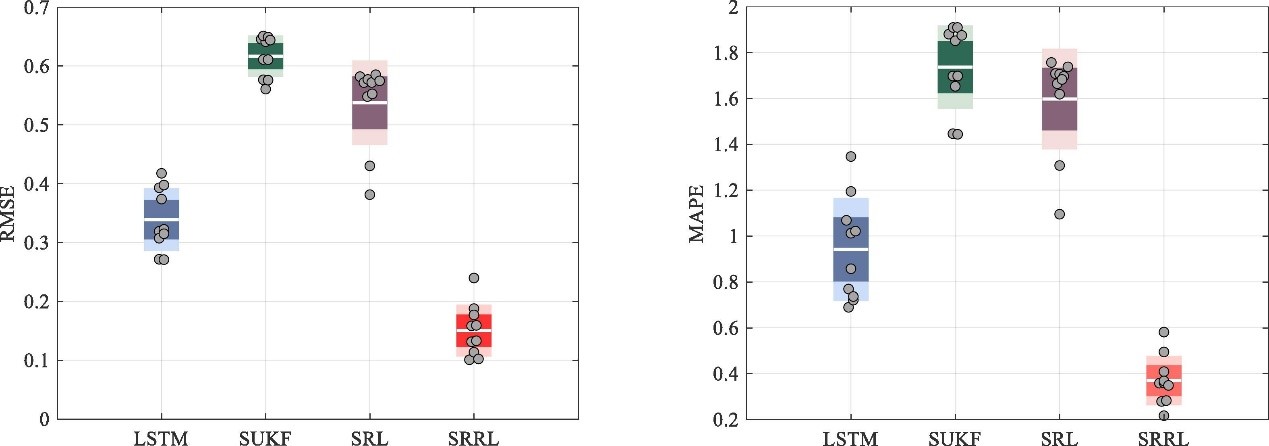
图4 使用实验轴承数据集的比较方法的RMSE和MAPE
致谢
该研究工作得到了加拿大自然科学和工程研究委员会和加拿大第一研究优秀基金的支持。本文通讯作者:Tian, Zhigang(Department of Mechanical Engineering, University of Alberta, Edmonton, AB, Canada)。
本期小编:程 航(整理)
徐浩波(校对)
王康康(审核)
闵 琳(发布)
|